 SEHR GUT (4.9 / 5.0)
SEHR GUT (4.9 / 5.0)

Klettermax 2
Eine weitere Variante des fast schon legendären "Klettermax"
Online seit: 10.04.2014,
Anzahl Besuche: 48728
0

Mein Team und ich hatten den Auftrag, einen Roboter zu kreieren, der senkrecht an einer Blechwand haftet, sich an dieser fortbewegt und eine Aufgabe zu bewältigen hat.
Die Aufgabe besteht darin, einen Ball in ein Acrylglasrohr am anderen Ende der Blechwand zu transportieren.
Wir haben diese Aufgabe etwas anders gelöst als die Projektgruppe 06 der NTB, die ihren Roboter "Vertical Sequences of Movement" bereits auf dieser Seite vorstellen durften.
Und auch anders als das bestehende Projekt Klettermax.
In nebenstehendem PDF ist das ganze Projekt beschrieben.
Einen kurzen Auszug veröffentlichen wir nachfolgend.
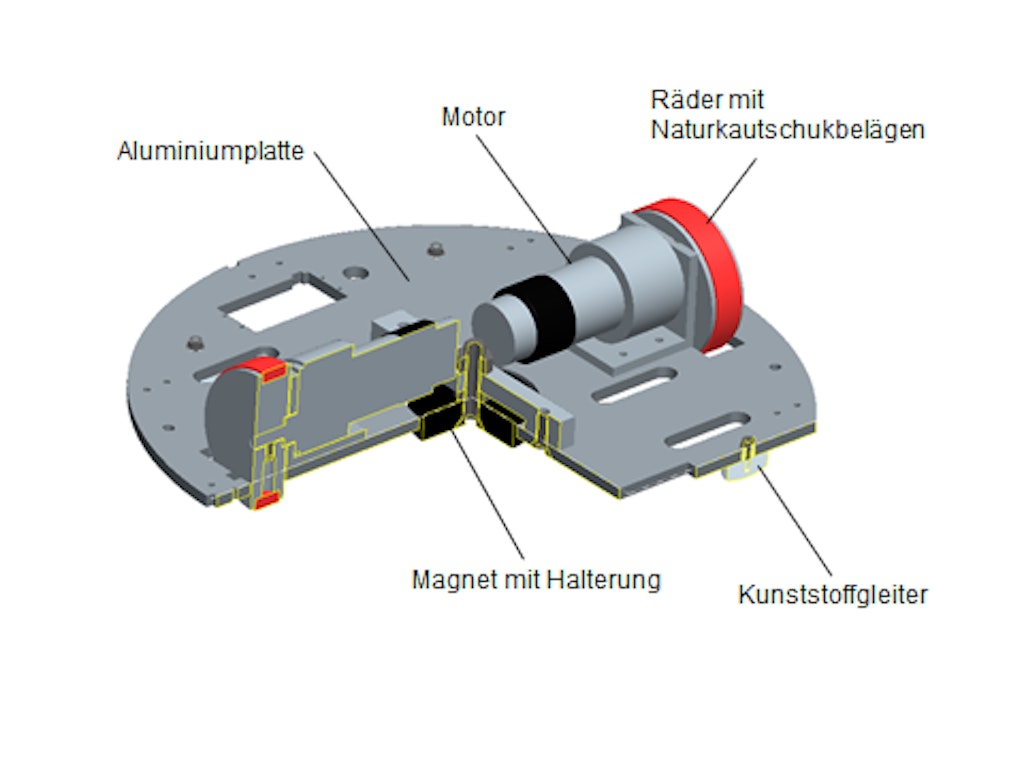
Gehalten durch die Kraft eines höhenverstellbaren Topfmagneten CSN-48
mit einer Haftkraft von 87 kg bewegt sich der Roboter auf zwei Rädern an der senkrechten Wand fort.
Im Zentrum der Aluminiumplatte ist der Topfmagnet an einer Halterung montiert.
Durch ein Gewinde in der Halterung und einer Mutter zum Kontern kann der Magnet in seiner Höhe verstellt werden, damit seine Haftkraft optimal ist.
Auf der Unterseite der Aluminiumplatte sind vier Kunststoffgleiter angebracht, damit der Roboter genügend Auflagepunkte hat.
Durch die Magnetlösung ist der Roboter wendig, schnell und kann sich sehr einfach ausrichten.
Dazu kann er jede Position einnehmen.
Wie das nachfolgende Video beweist, ist die Haftkraft des Topfmagneten ausreichend, dass der Roboter sicher an der Blechwand navigieren kann.
Beim Loslassen des Balls hapert es leider noch ein bisschen :-)
Verwendete Artikel
Laden...

Neodym-Topfmagnet Ø 48 mm mit Senkbohrung, hält ca. 87 kg,
| 1 St. | 12.20 CHF/St.* | |
| ab | 3 St. | 10.90 CHF/St.* |
| ab | 10 St. | 9.85 CHF/St.* |
| ab | 20 St. | 9.35 CHF/St.* |
| ab | 40 St. | 8.85 CHF/St.* |
| Rabatt anfragen ab 450 St. | ||
verfügbar: 72 St.

Neodym-Topfmagnet Ø 48 mm mit zylindrischer Bohrung, hält ca. 63 kg,
| 1 St. | 10.65 CHF/St.* | |
| ab | 3 St. | 9.45 CHF/St.* |
| ab | 10 St. | 8.35 CHF/St.* |
| ab | 20 St. | 7.80 CHF/St.* |
| ab | 40 St. | 7.35 CHF/St.* |
| Rabatt anfragen ab 120 St. | ||
verfügbar: 1'611 St.
0 Personen gefällt dieses Kundenprojekt
-Projekte werden in Ihrem Kundenkonto gemerkt
Das könnte Sie auch interessieren
Stichwörter
Der gesamte Inhalt dieser Seite ist urheberrechtlich geschützt.
Ohne ausdrückliche Genehmigung darf der Inhalt weder kopiert noch anderweitig verwendet werden.
Ohne ausdrückliche Genehmigung darf der Inhalt weder kopiert noch anderweitig verwendet werden.